【儀表網 研發快訊】南京大學物理學院屠娟教授、章東教授聯合南京大學生命科學學院朱景寧教授、張瀟洋特聘研究員提出基于速度約束與運動補償的超快超聲定位顯微成像算法,突破“分辨率極限”,并在大鼠腦、腎等器官中實現了微血管網絡的超分辨率成像,繪制高清晰“生命微觀通路圖”,為心腦血管及微循環系統相關的基礎醫學研究和重大疾病診療提供了全新顯像工具。
超聲檢查因其安全無創、無電離輻射、操作便捷,已成為臨床診斷的重要工具。然而傳統超聲成像技術存在一個關鍵瓶頸,即受限于物理衍射極限,其空間分辨率難以清晰顯示組織器官內部細小的微循環血管網絡,這些血管的直徑往往只有頭發絲的十分之一,但其微血流分布的變化往往與心、腦、肝、腎等器官的重大疾病密切相關。
而超分辨的超聲定位顯微成像(Ultrasound Localization Microscopy,ULM)技術,通過追蹤微米尺度的超聲造影劑微泡,并精確描繪這些微泡的運動軌跡,成功繪制高清“微血管通路圖”。這項突破使研究人員首次能夠利用超聲成像清晰觀察到腦組織、腫瘤微環境等關鍵部位的精細血流分布。但這項技術在實際應用中遇到了幾個“卡脖子”難題:
·“認錯人”問題:當微泡數量多、血流速度快(如心臟附近)或圖像有干擾時,容易混淆微泡運動軌跡。
·“算得慢”瓶頸:重建一幅高清血管圖需要大量計算,難以滿足臨床術中實時成像的需求。
·“脈動”干擾:患者呼吸、心跳等自然運動會干擾微泡信號追蹤,導致圖像重建模糊。
這些技術瓶頸嚴重制約著ULM在臨床中的廣泛應用。正因如此,研發新一代更智能、更快速的超聲定位顯微成像技術已成為亟需突破的關鍵難題。
針對以上挑戰,南京大學科研團隊提出了一項關鍵技術突破——融合運動補償和速度約束的卡爾曼濾波超聲定位顯微成像(vc-Kalman ULM)算法。該方法的主要創新點包括:
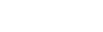
(1)速度約束卡爾曼濾波追蹤算法:首先構建包含微泡空間位置和亮度特征的狀態向量,通過“預測-匹配-校正”的遞歸優化框架,結合速度約束規則自動濾除“假信號”,精準追蹤微泡軌跡。針對大鼠腦部微血管成像(圖1)結果顯示,vc-Kalman ULM可以有效提升微泡追蹤準確度,清晰顯示微血管網絡空間分布及運動方向,并精準量化微血流速度變化。
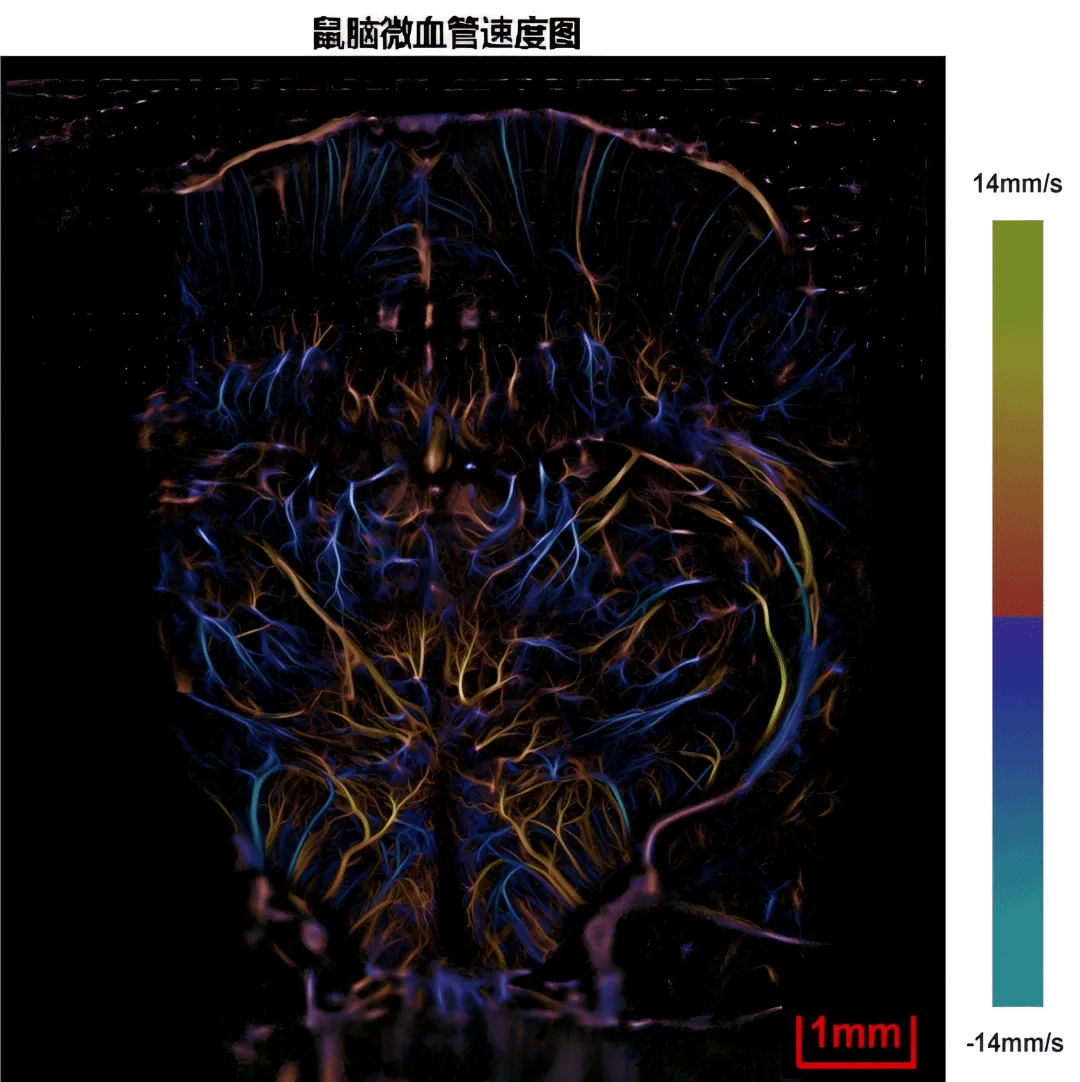
圖1.大鼠顱腦微血管速度圖
(2)自適應運動補償機制:結合動態規劃與互相關搜索,有效消除呼吸、心跳等組織生理運動帶來的圖像擾動,確保在心、腎等生理運動幅度較大的器官中也能重建出高精度的超分辨率血流通路圖像。大鼠腎皮質中微血流成像(圖2)實驗結果顯示,基于動態規劃的互相關搜索過程可實現有效的運動補償,成功抑制了大鼠腎臟因呼吸、心跳及輕微組織運動而產生的噪聲和擾動,清晰顯示微小血管的邊緣輪廓,圖像信噪比(CNR)和誤差指標(nRMSE)全面優于傳統算法。
圖2.大鼠腎微血管傳統算法與vc-Kalman算法對比
(3)低幀率條件下保持“穩、準、清”:本研究提出的vc-Kalman算法成功解決了傳統ULM在低幀率成像時的軌跡匹配精度下降問題。通過融合微泡亮度特征與歷史位置等多維信息,即使在146 Hz的幀率條件下也能實現可靠的微泡定位和微血流成像,這一突破將顯著降低數據采集和傳輸要求,為便攜式設備和術中實時成像鋪平道路。圖3展示了不同采樣幀率下傳統ULM方法與vc-Kalman ULM方法成像的結果對比,很明顯vc-Kalman算法相較于傳統算法具有更高的魯棒性。

圖3.不同幀率條件下,傳統算法和vc-Kalman算法對比結果
相關研究成果以題為“Velocity-Constraint Kalman Filtering for Enhanced Bubble Tracking in Motion Compensated Ultrasound Localization Microscopy”的工作近日發表于Research期刊上(2025,8:0725,DOI:10.34133/research.0725)。
未來,研究團隊將基于更強大的并行計算架構,持續優化GPU加速方案,進一步探索三維、多通道成像方案。基于這些技術創新,目標實現2000幀/秒的超高速三維ULM成像,構建便攜式、高通量、高分辨率的“未來超聲顯微平臺”,有力推動該技術在腦卒中預警、腫瘤篩查、術中導航等臨床關鍵場景落地應用。



















所有評論僅代表網友意見,與本站立場無關。